Human endurance can be improved by distributing work across multiple muscles or joints.
Optimization of human-powered elastic mechanisms for endurance amplification
Throughout the human body hundreds of muscles exert forces to stiffen and move the limbs and torso. During heavy exercise, only a small portion of these...
READ MORE
Walking exoskeletons hold the potential to let people walk longer, faster, or walk while carrying more weight.
Autonomous powered leg exoskeleton
For over a century, technologists have strived to develop autonomous leg exoskeletons that reduce the metabolic energy consumed when humans walk and run, but such technologies...
READ MORE
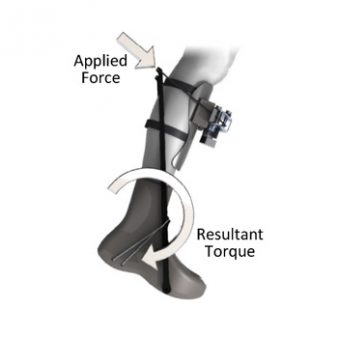
Powered ankle-foot orthoses have the potential to restore missing ankle function by actuating the human foot with computer-controller actuators.
Adaptive control of a variable-impedance ankle-foot orthosis to assist drop-foot gait
An active ankle-foot orthosis (AAFO) is presented where the impedance of the orthotic joint is modulated throughout...
READ MORE
The Biomechatronics Group seeks to use exoskeletons to decrease the metabolic burden associated with running, thereby increasing endurance and achievable distance.
The biomechanics and energetics of human running using an elastic knee exoskeleton
While the effects of series compliance on running biomechanics are well documented, the effects...
READ MORE
The Biomechatronics Group is developing a robotic research platform that can simulate a variety of wearable devices, enabling rapid advancement of the human-machine interface.
A powerful six degrees-of-freedom tethered wearable robotic system is proposed for understanding how a wearable robotic intervention worn on the legs of...
READ MORE