Prosthetic Design
The Biomechatronics Group is developing transtibial prostheses that produce net mechanical work. Such prostheses can restore an important component of biological ankle function for lower-extremity amputees. Powered ankle–foot prosthesis improves walking metabolic economy At moderate to fast walking speeds, the human ankle provides net positive...
View
Powered transfemoral prostheses have the ability to ameliorate the substantial energetic cost difference between amputees and non-amputees during walking. To this end, we are currently developing such technologies. Agonist-antagonist active knee prosthesis: a preliminary study in level-ground walking. We present a powered knee prosthesis...
View
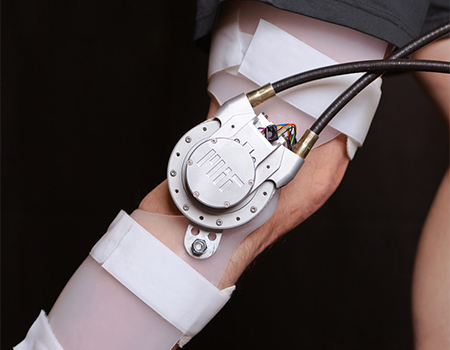
The quasipassive transfemoral prostheses developed in this lab have onboard computation and control, but require minimal electrical power to operate. These devices provide biomechanial functionality without requiring large batteries and actuators. User-adaptive control of a magnetorheological prosthetic knee A magnetorheological knee prosthesis is presented...
View
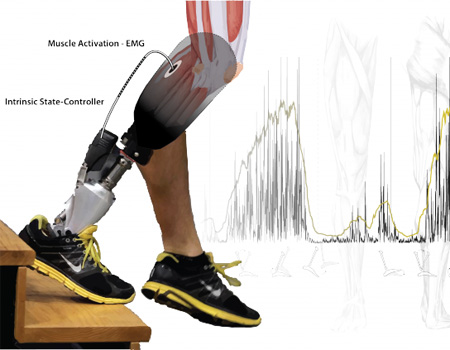
Neural control of bionic prostheses will allow users to dynamically adapt their gait to changing terrains. Proportional EMG Control of Ankle Plantar Flexion in a Powered Transtibial Prosthesis The human calf muscle generates 80% of the mechanical work to walk throughout stance-phase, powered plantar...
View
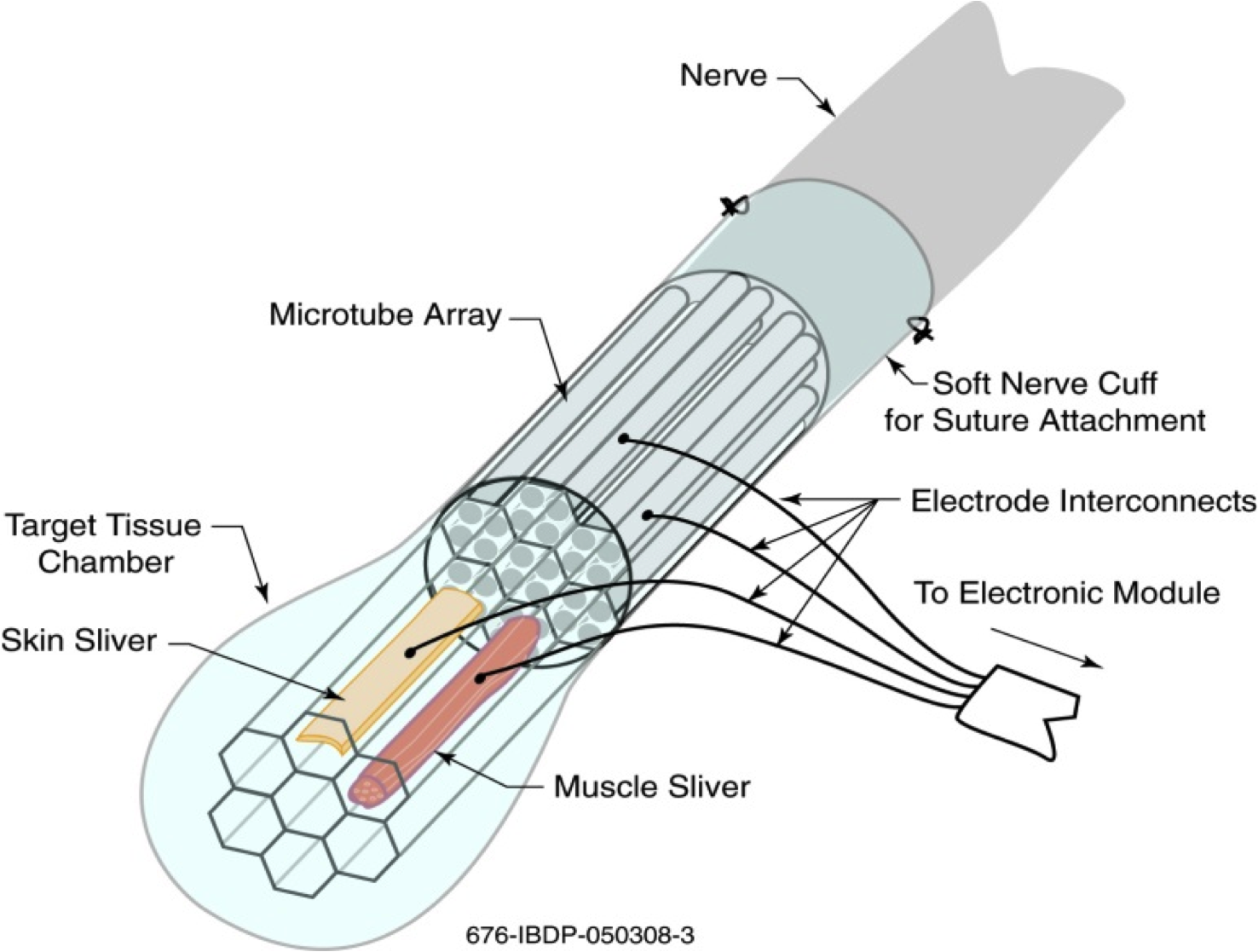
Interfacing bionic prostheses with the peripheral nervous system will allow amputees to receive tactile feedback from their prosthesis and volitionally control it akin to their biological limbs. The goal of the Neural Interfaces Laboratory is to develop implantable devices that provide bi-directional communication between the...
View
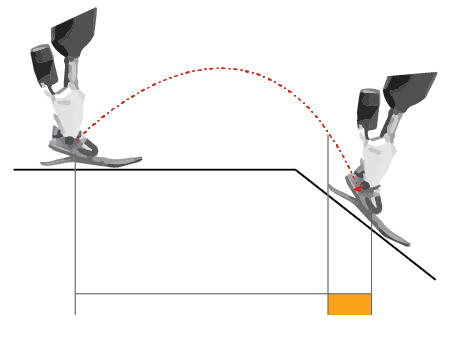
Robotic wearable devices often must be able to distinguish among many different terrain conditions. We are developing methodologies for detecting these conditions with available sensor technology. A method to determine the optimal features for control of a powered lower-limb prostheses Lower-limb prostheses are rapidly...
View
Even with cutting-edge bionic devices, it is not always clear how to best control them. To this end, we are developing methods that enable a device to automatically tailor its behavior for a given wearer. User-adaptive control of a magnetorheological prosthetic knee A magnetorheological...
View
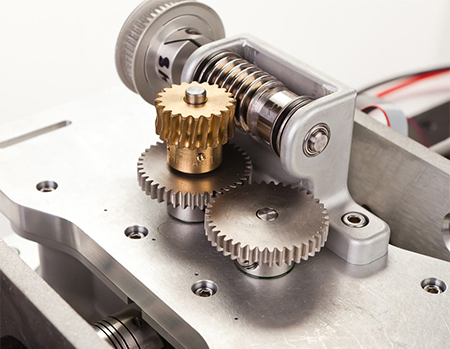
The Biomechatronics Group uses biologically inspired actuator design to create robust and efficient performance. This technology is implemented in many of the bionic devices produced by our group. Continuously Variable Series-Elastic Actuator Actuator efficiency is an important factor in design of powered legged robots....
View
Towards the goal of developing more comfortable, better-fitting wearable devices, tools are being developed that can sense the properties of soft-tissues in human limbs. Sockets–the cup-shaped devices that attach an amputated limb to a lower-limb prosthesis–are made through unscientific, artisanal methods that do not have repeatable...
View
The Biomechatronics Group seeks to develop a seamless interface between human skin and contact surfaces of the wearable devices. A Variable-Impedance Prosthetic Socket for a Transtibial Amputee Designed from Magnetic Resonance Imaging Data This article evaluates the design of a variable impedance prosthetic (VIPr)...
View
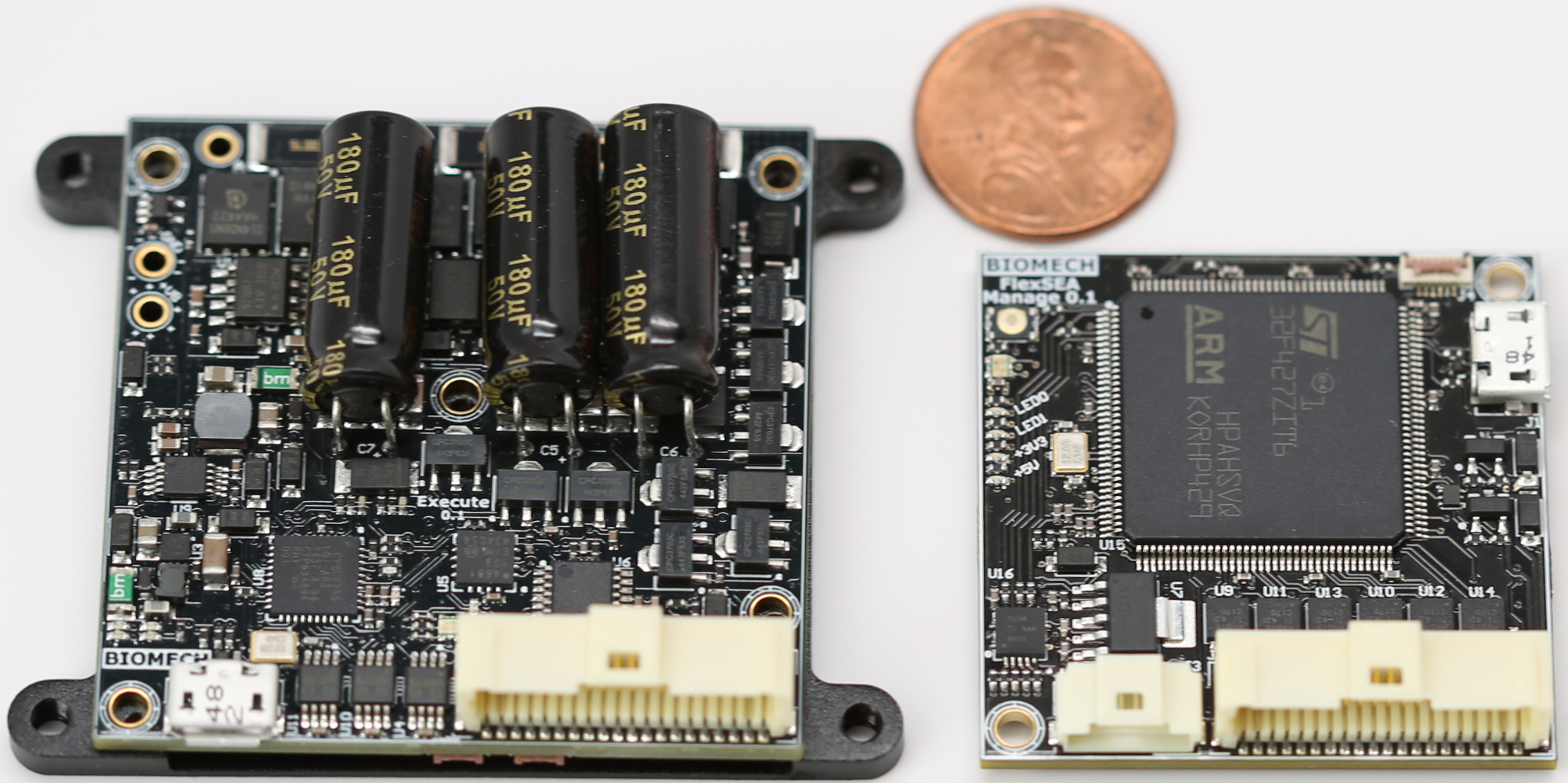
Flexible, Scalable Electronics Architecture for Wearable Robotic Applications Embedded systems for wearable robotics are ideally low-cost, lightweight, miniature, reliable and safe. They have high peak output and negligible standby power, are simple to use and program, can support high-performance real-time control loops and accept additional...
View
The Biomechatronics Group is developing a robotic research platform that can simulate a variety of wearable devices, enabling rapid advancement of the human-machine interface. A powerful six degrees-of-freedom tethered wearable robotic system is proposed for understanding how a wearable robotic intervention worn on the legs...
View
The Biomechatronics Group seeks to use exoskeletons to decrease the metabolic burden associated with running, thereby increasing endurance and achievable distance. The biomechanics and energetics of human running using an elastic knee exoskeleton While the effects of series compliance on running biomechanics are well...
View
Walking exoskeletons hold the potential to let people walk longer, faster, or walk while carrying more weight. Autonomous powered leg exoskeleton For over a century, technologists have strived to develop autonomous leg exoskeletons that reduce the metabolic energy consumed when humans walk and run,...
View
Human endurance can be improved by distributing work across multiple muscles or joints. Optimization of human-powered elastic mechanisms for endurance amplification Throughout the human body hundreds of muscles exert forces to stiffen and move the limbs and torso. During heavy exercise, only a small...
View
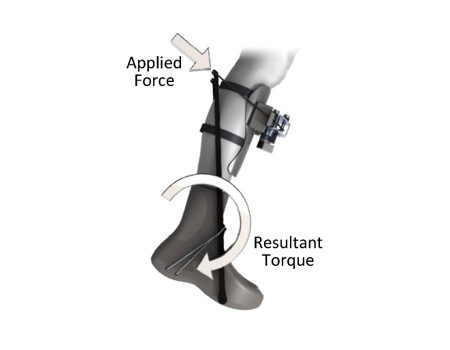
Powered ankle-foot orthoses have the potential to restore missing ankle function by actuating the human foot with computer-controller actuators. Adaptive control of a variable-impedance ankle-foot orthosis to assist drop-foot gait An active ankle-foot orthosis (AAFO) is presented where the impedance of the orthotic joint...
View
Muscle tissue can be employed as mechanical actuators for robots in the millimeter to centimeter size scale. Living muscle might one day be employed as a practical, controllable actuator A swimming robot actuated by living muscle tissue Biomechatronics is the integration of biological components with...
View