Investigating the biomechanics of quadrupedal running provides a framework for understanding aspects from control to energetics of running.
A model of scale effects in mammalian quadrupedal running
Although the effects of body size on mammalian locomotion are well documented, the underlying mechanisms are not fully understood. The...
READ MORE
The Biomechatronics Group uses a data-driven approach to study the mechanics and control of human running, with the goal of applying the findings to hardware control.
Swing-leg retraction: a simple control model for stable human running
In running, the spring-like axial behavior of stance limbs is a...
READ MORE
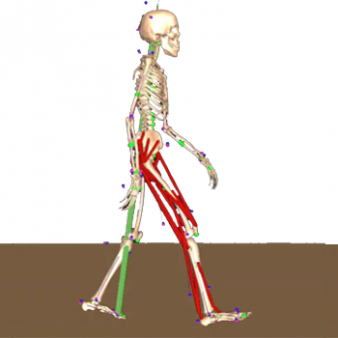
The Biomechatronics Group uses a data-driven approach to study the mechanics and control of human walking, with the goal of applying the findings to hardware control.
Data driven neuromuscular model of walking
We have constructed a data-driven neuromuscular model of human walking and are applying it to...
READ MORE